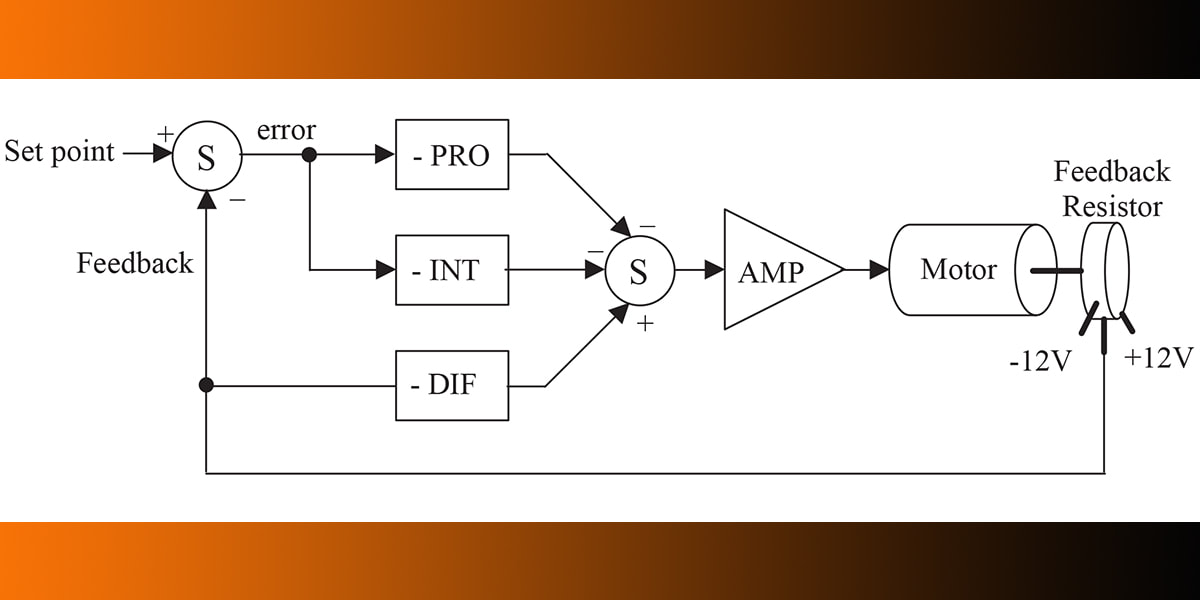
 PID control loop rules of thumb
1. Work on only one adjustment at a time. If you start making changes to all three controls at the same time, you can easily get disoriented. 2. Proportional gain controls how quickly the process races toward the setpoint. If you set a very high gain, expect to reach your setpoint quickly but be prepared for the possibility of drastic overshoot and oscillations. If you set a very low gain, you can prevent the overshoot, but it may take a long time to reach your setpoint. Start with the integral time, derivative time, and proportional gain all at zero. Increase the proportional gain value in small increments until oscillations occur, and then reduce the setting. 3. The integral time acts like an error eater. It can help reduce the oscillation time and remove the offset, but improper adjustment can cause an increase in overshoot as well as lead to the system having oscillations. Increase the integral time value in small increments until the oscillations and the offset have been eliminated. 4. The derivative time provides a braking action to the control loop and is not required in most applications where a little overshoot is allowable. If it is needed, derivative control can reduce overshoots but could also lead to a lack of responsiveness. Increase the derivative time value until the response to process changes is optimized. |
AuthorWrite something about yourself. No need to be fancy, just an overview. ArchivesCategories |
 RSS Feed
RSS Feed